SEGGER J-Link
This article provides information on SEGGER J-Link debugger tool.
Requirements
You will need the following hardware and software tools:
-
One of these operating systems:
- Ubuntu 20.04 / 22.04
- macOS 11 / 12 (with Homebrew installed)
- Windows 10 / Windows 11
-
Python 3 distribution installed on your system:
- Windows
- Linux
- macOS
Download the latest stable installer from this link.
cautionPlease tick Add Python x.x to PATH in installer so the Python executable is available from any location.
Run this command in the Terminal app:
sudo apt install python3Run this command in the Terminal app:
brew install python3 -
HARDWARIO CHESTER device (you will need to open the enclosure top cover with six screws)
-
USB debugger/programmer SEGGER J-Link (including a 10-pin SWD adapter + flat cable)
tipHARDWARIO provides SEGGER J-Link + all the required accessories on demand.
-
Micro-USB cable with appropriate plug type to your computer
dangerSome Micro-USB cables provide only power and no data signals. If the connection between J-Link, and your system does not work, check the cable type in the first place.
-
Python application bundle HARDWARIO Command Line Tools
Instalation
You can install HARDWARIO Command Line Tools with these steps:
-
On Windows only - Install SEGGER J-Link drivers:
-
Download 64-bit Intel/AMD installer
-
Download 32-bit Intel/AMD installer
-
Download 64-bit ARM installer
cautionIf you encounter An error was reported by NRFJPROG DLL: -101 JLINKARM_DLL_COULD_NOT_BE_OPENED please visit this page.
-
-
Open the Terminal (Ubuntu or macOS) or Command Prompt (Windows) application.
-
Initialize the Python virtual environment:
python3 -m venv hardwario-venv -
Activate the Python virtual environment:
source hardwario-venv/bin/activatecautionWhen you close the Terminal or Command Prompt, you must reactivate the Python virtual environment. Simply call the command from the above procedure:
source hardwario-venv/bin/activate. -
Install HARDWARIO Command Line Tools:
pip install hardwario -
You can verify the installation with the following command:
hardwario --versionIt should provide output similar to this:
hardwario.chester v1.23.0hardwario.cloud v1.4.2hardwario.common v1.7.2hardwario.hardwario v1.3.1
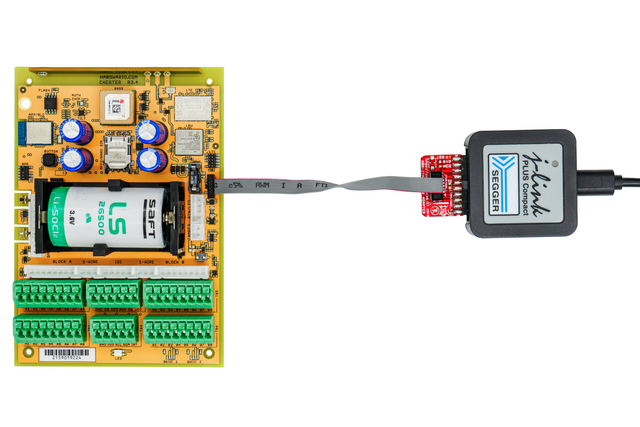
SEGGER J-Link to APP Port Connection
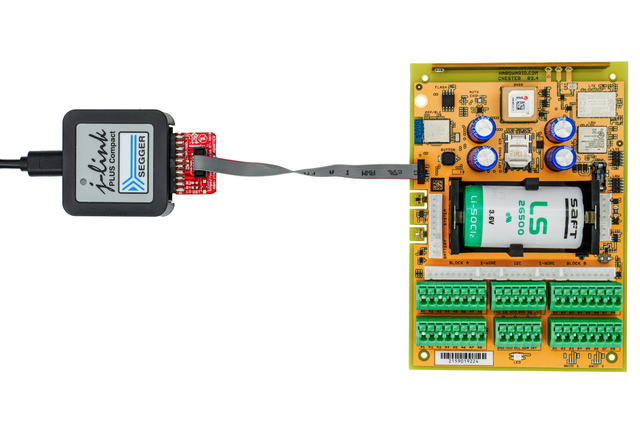

SEGGER J-Link to LTE Port Connection
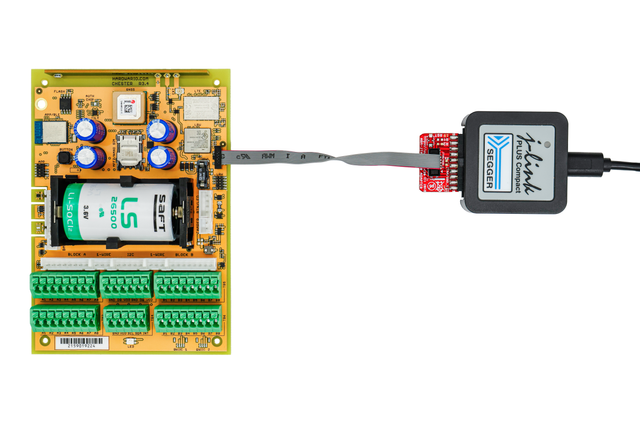

SEGGER J-Link to LRW Port Connection